HRD Fault diagnosis using hybrid method of deep learning and signal processing
Background of research
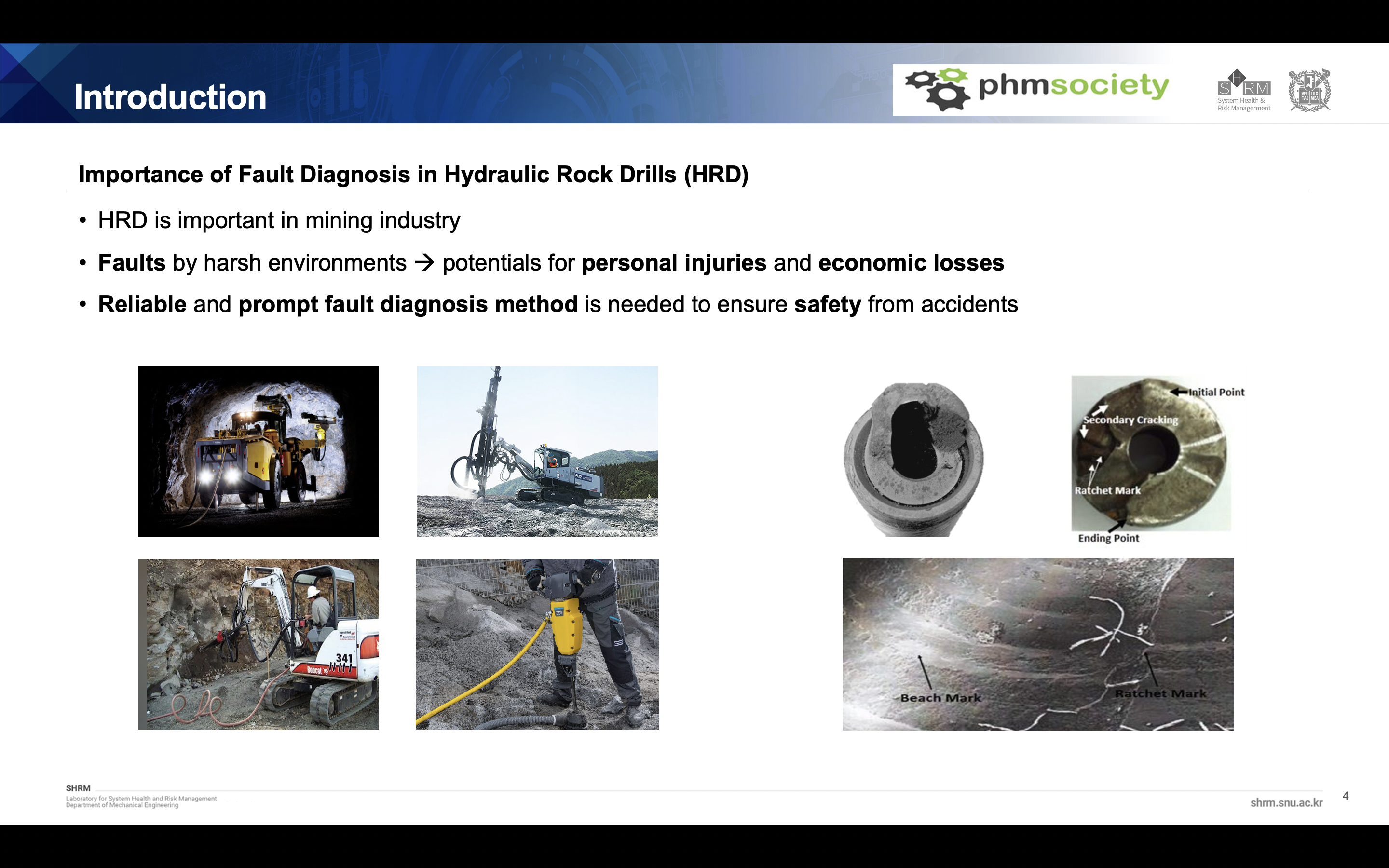
HRD is used in many drilling operations like excavation and it is important in mining industry. As HRD frequently operates under harsh conditions, diverse failures modes occur and these makes potentials for personal injuries and economic losses. So, Reliable and prompt fault diagnosis method is needed to ensure safety from accidents
Data description
The data set is from 2022 PHM Society Data Challenge. We can use three types of pressure signal of HRD, Percussion pressure at inlet fitting, Damper pressure inside the outer chamber, Pressure in the volume behind the piston. there are many individuals from 1 to 8 where the data distributions are different to each other. And finally, there are 10 types of fault modes in HRD as you can see in the right table. There are some fault pairs that are really difficult to classify and it is also challenging. 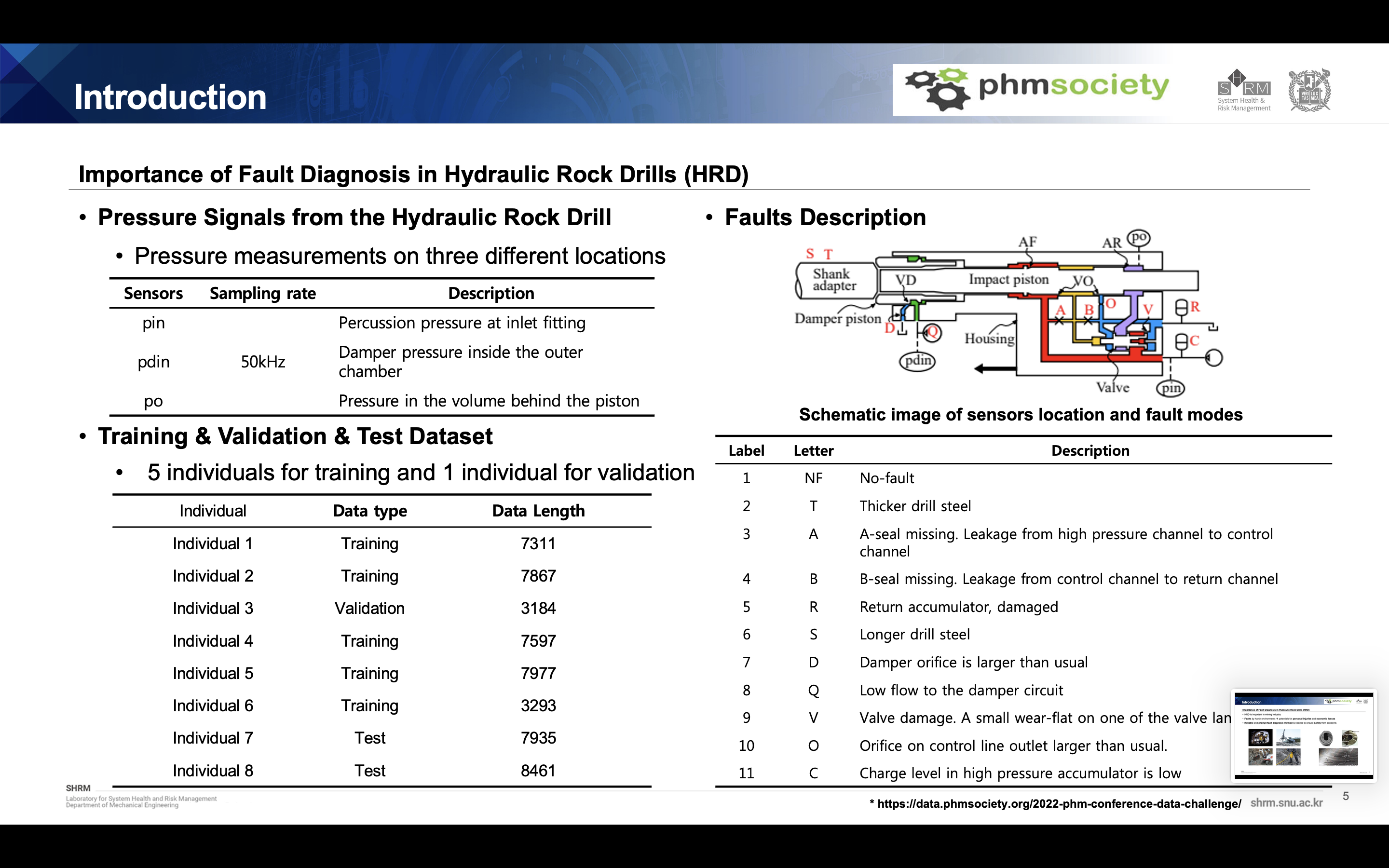
Flow chart of proposed method
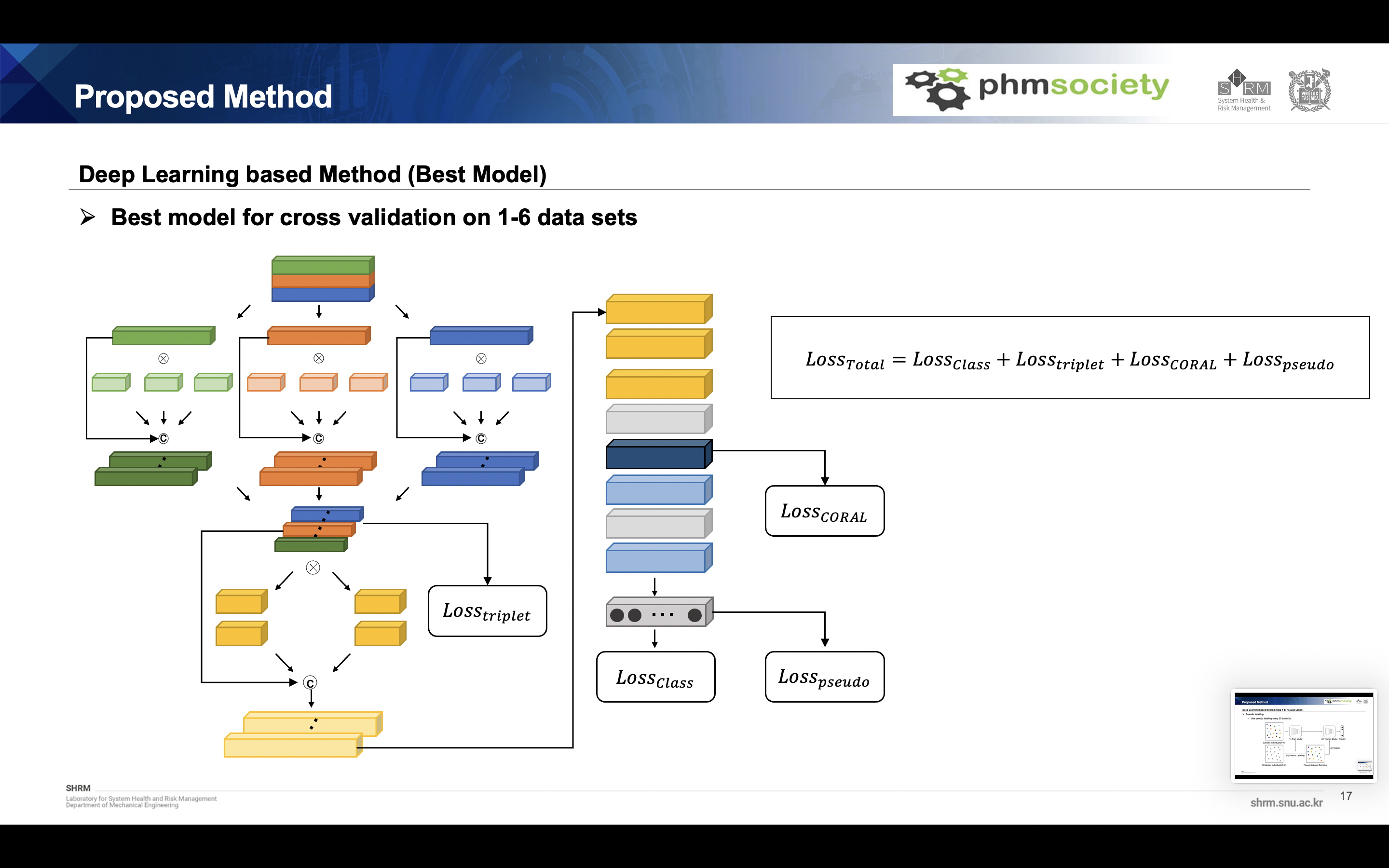
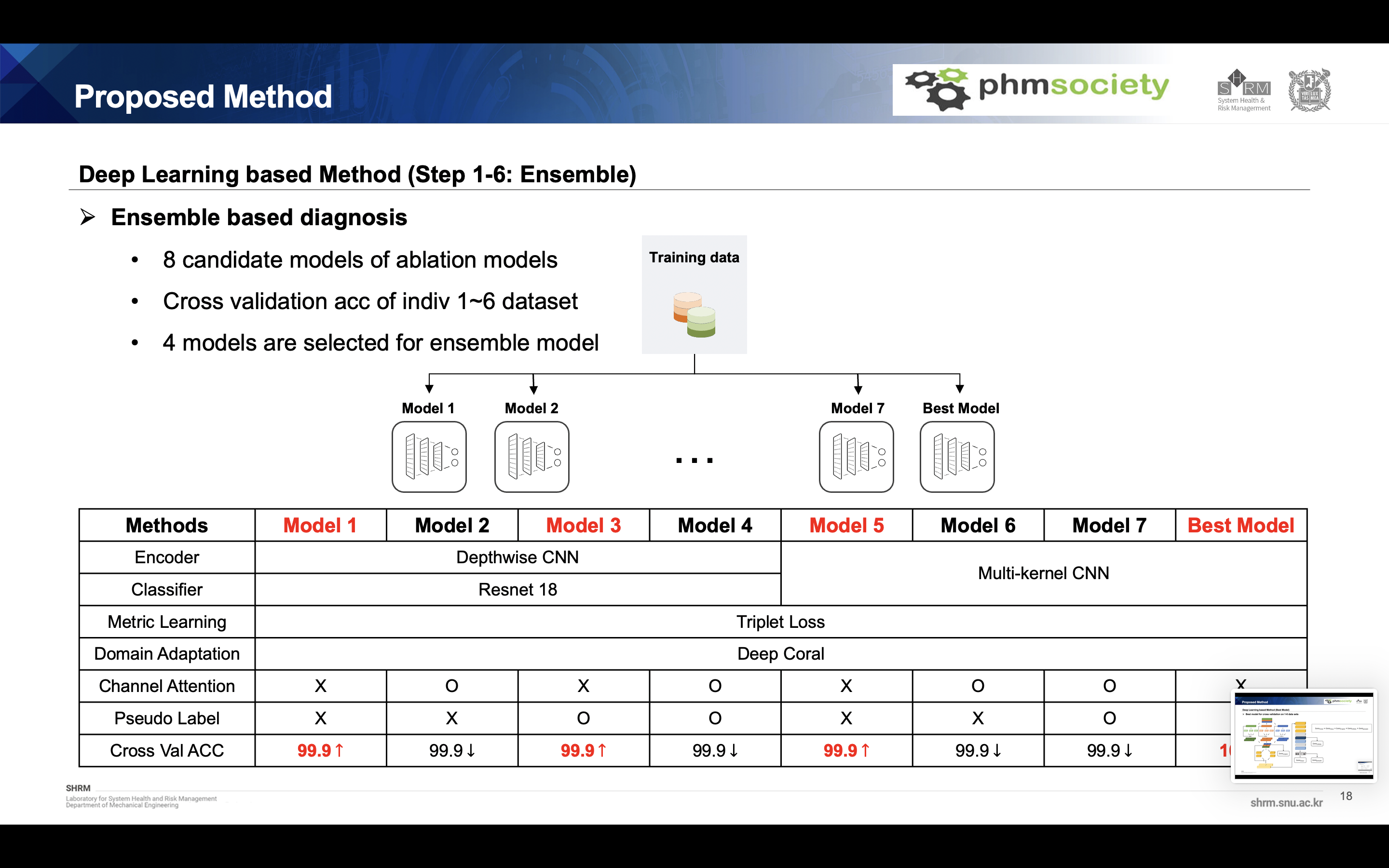
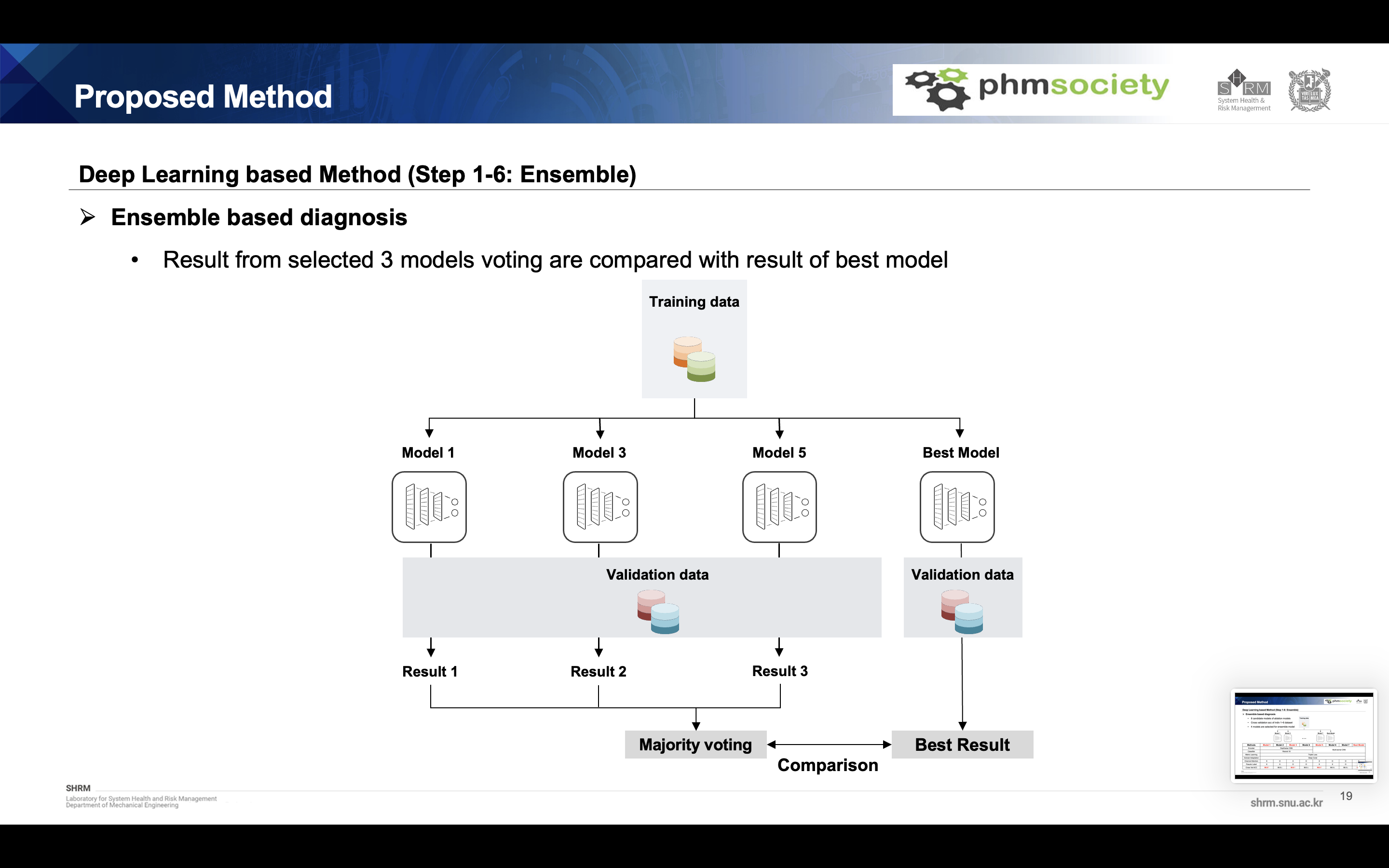
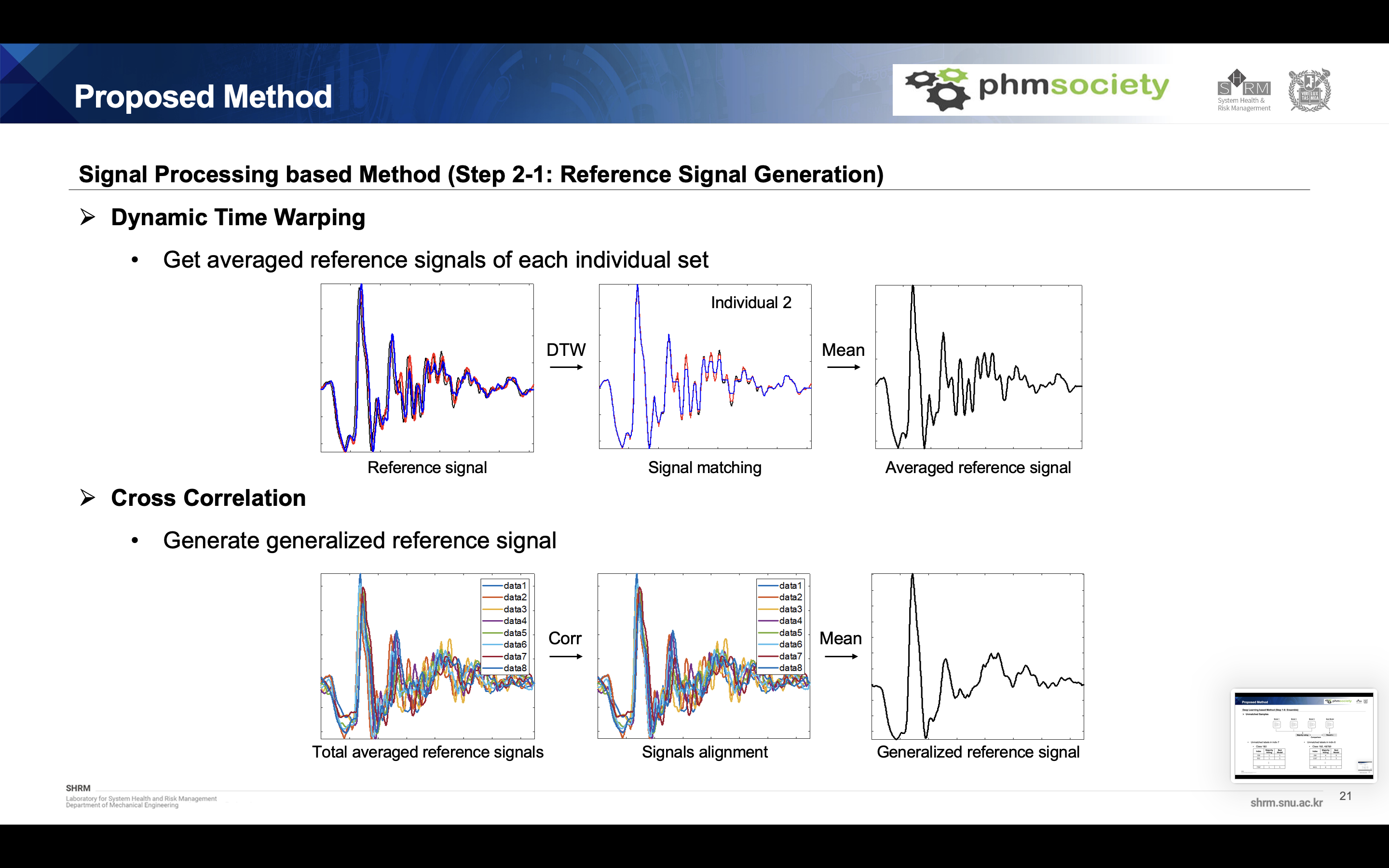
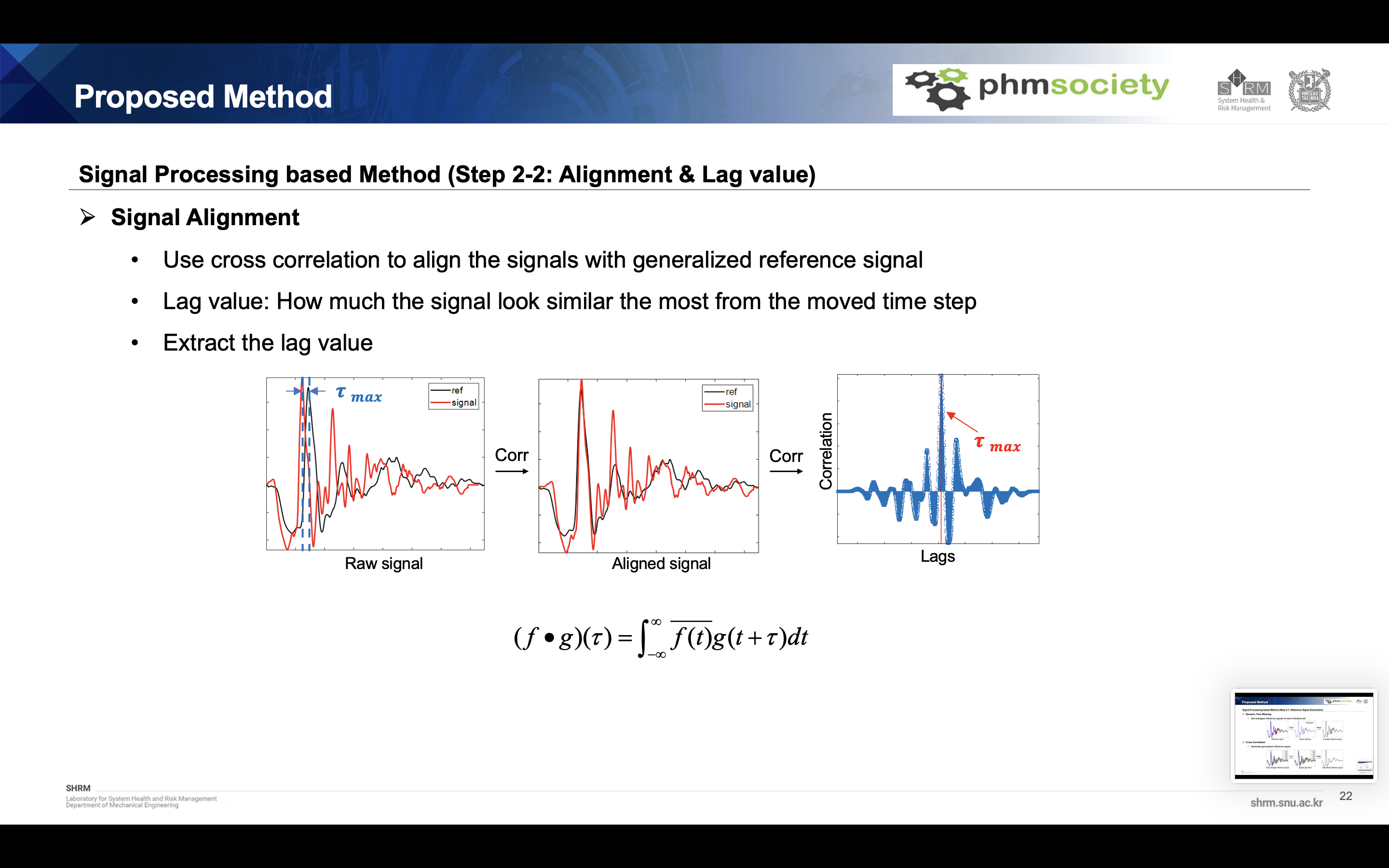
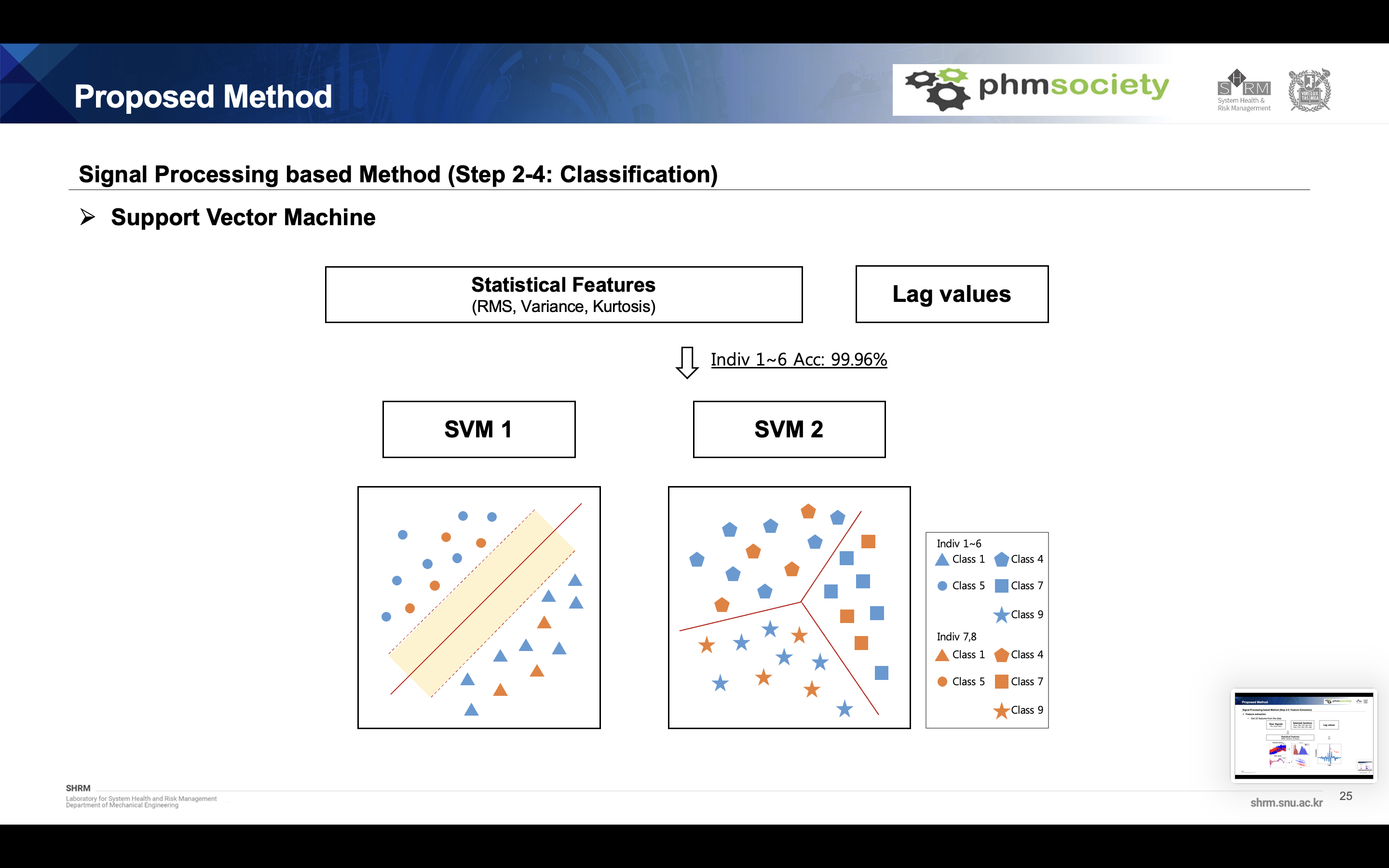
Our proposed method is as follows. It is divided into deep learning based diagnostics and signal processing based diagnostics. In the first section, the modified version of cnn-based model was used, and overall fault diagnosis was performed using metric learning, domain adaptation, pseudo labeling, and ensemble learning. Here, uncertainty samples were extracted and verified with a signal processing based model. 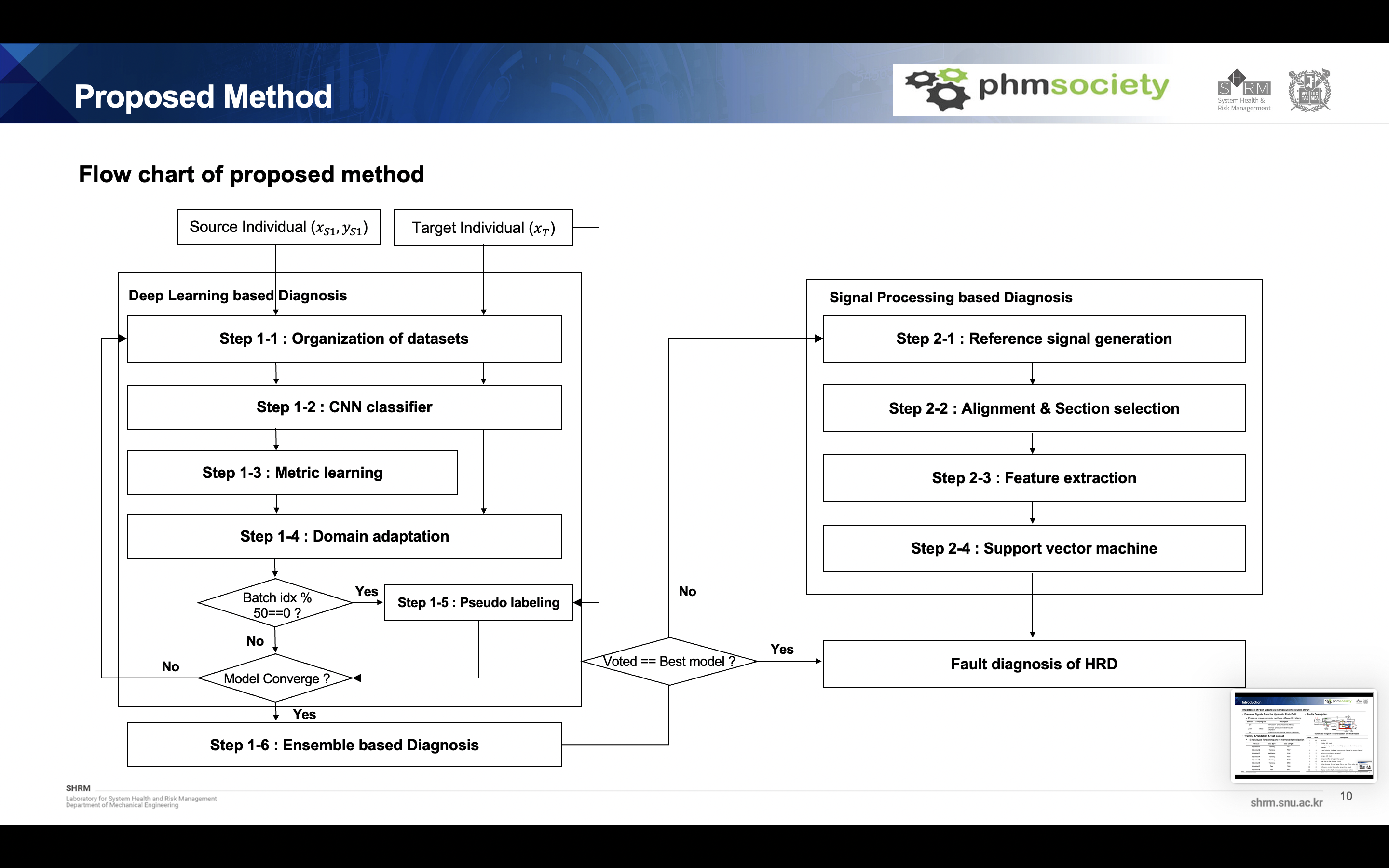
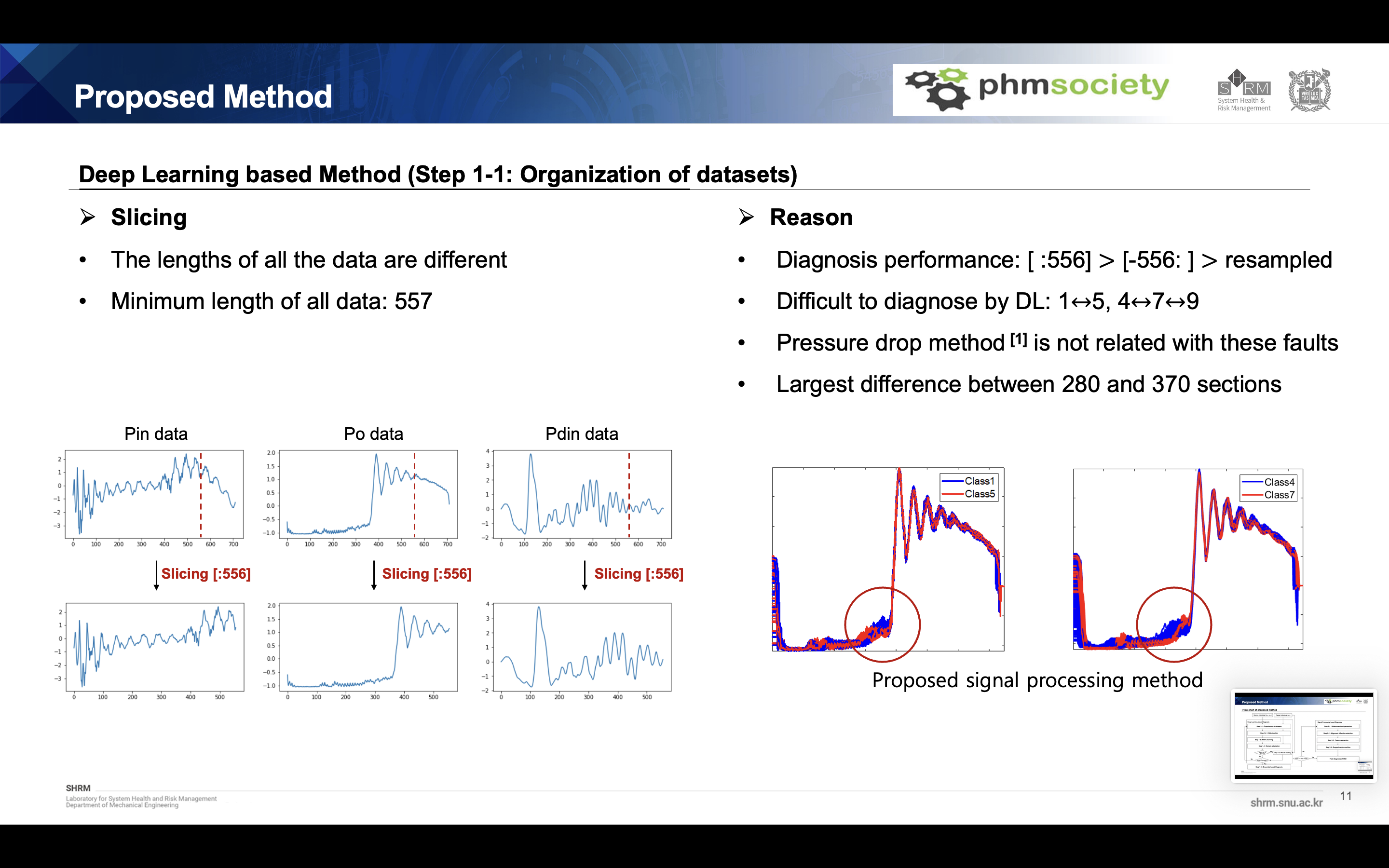
Data length problem
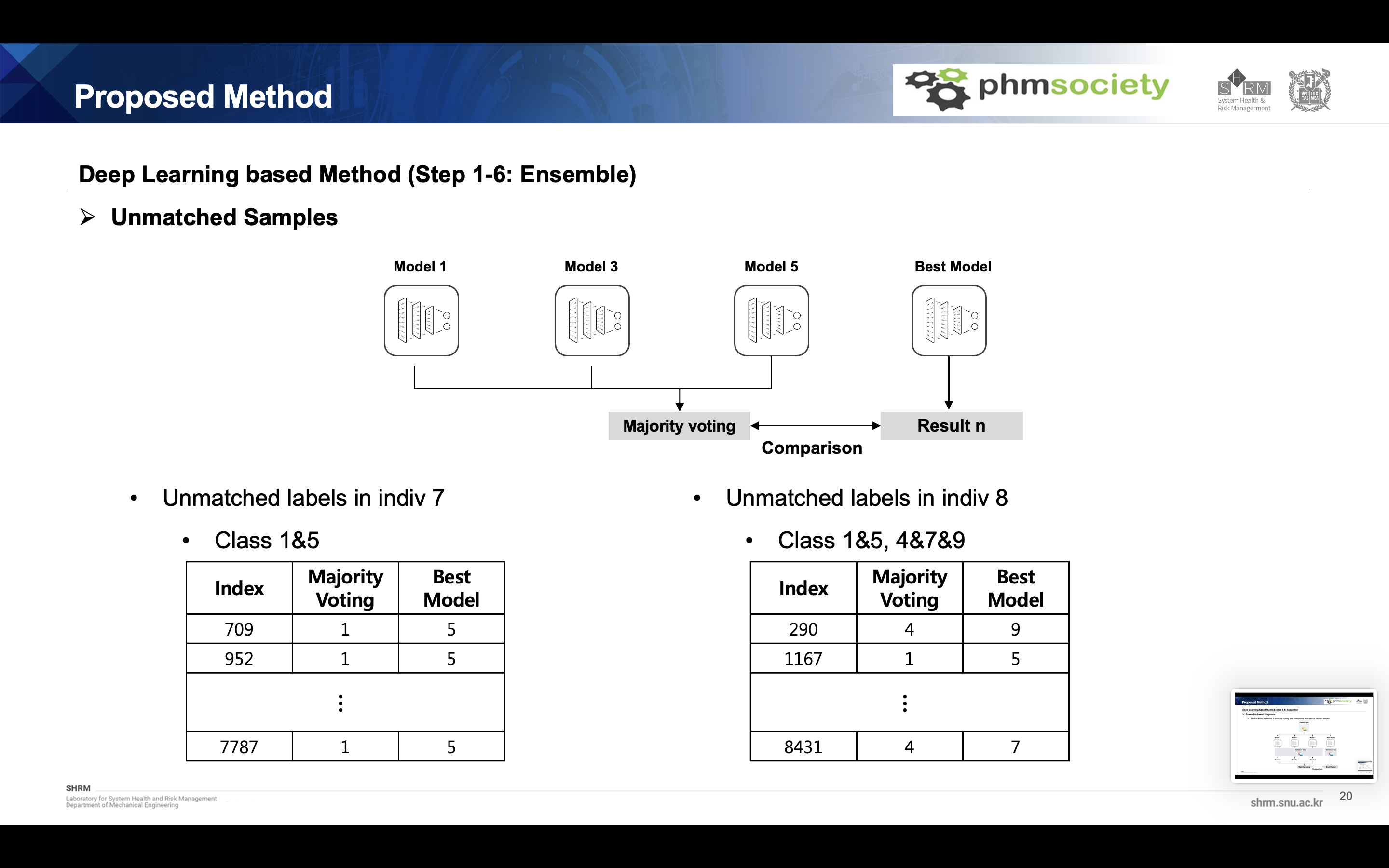
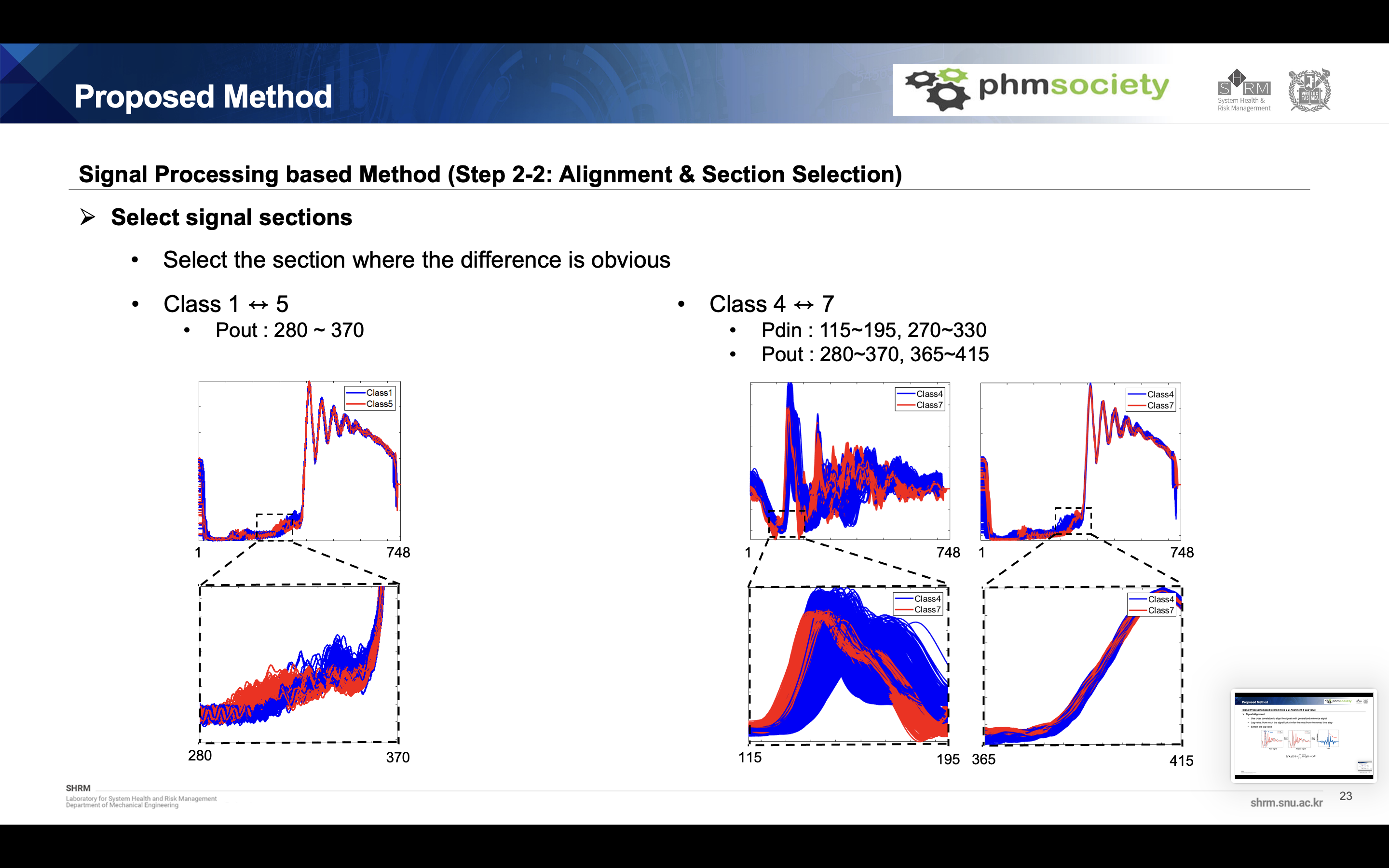
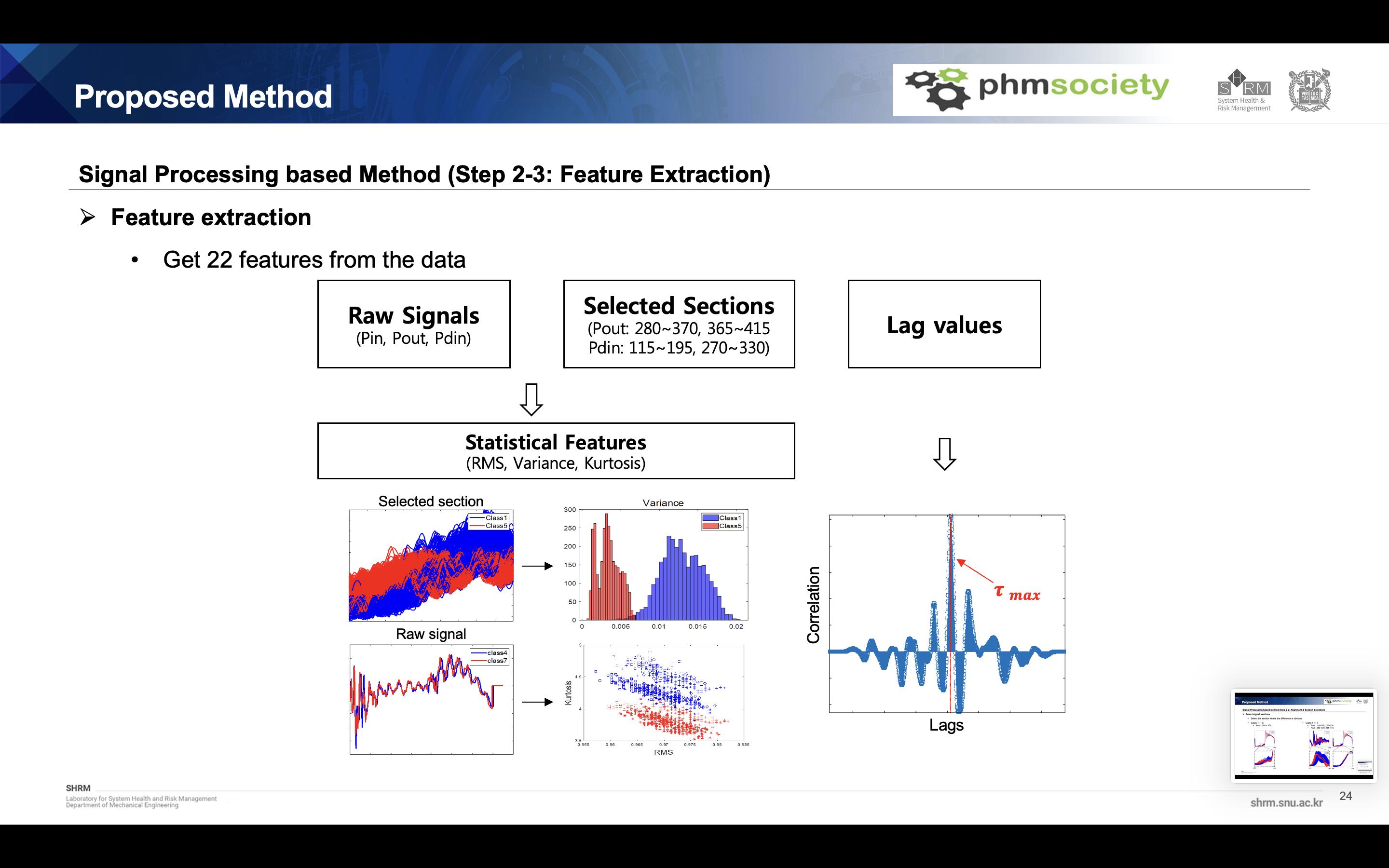
CNN-based models have gone through a sliding process because they always require the same length of input. We cut and used the length from 0 to 556 for each data index. The reasons are as follows. First, when the accuracy of the learning set was checked by cross validation, the accuracy of the 0-556 section was better than other methods. The second class, which is not well distinguished by deep learning, was No. 1, No. 5, No. 4, No. 7, No. 9, and the previously mentioned physics-based model such as pressure drop was not related to this failure case. Especially when using the proposed method, the most important part is the presence term in the middle.
’’’ class customdataset(Dataset): def _init__(self, data, label): super()._init__() self.pin_data=data[:,0,:].unsqueeze(1)
self.po_data=data[:,1,:].unsqueeze(1) self.pdin_data=data[:,2,:].unsqueeze(1) self.label=label
def __len__(self):
return len(self.label)
def __getitem__(self, idx):
pin_data = self.pin_data[idx]
po_data = self.po_data[idx]
pdin_data = self.pdin_data[idx]
label = self.label[idx]
return pin_data.to(device).float(),po_data.to(device).float(),pdin_data.to(device).float(), label.to(device) class customdataset_ts(Dataset):
def __init__(self, data):
super().__init__()
self.pin_data=data[:,0,:].unsqueeze(1)
self.po_data=data[:,1,:].unsqueeze(1)
self.pdin_data=data[:,2,:].unsqueeze(1)
def __len__(self):
return len(self.pin_data)
def __getitem__(self, idx):
pin_data = self.pin_data[idx]
po_data = self.po_data[idx]
pdin_data = self.pdin_data[idx]
return pin_data.to(device).float(),po_data.to(device).float(),pdin_data.to(device).float() def loaders(data,label, data2,label2):
train_set, valid_set, train_label, valid_label = train_test_split(data, label, train_size=0.9, random_state=1)
traindataset = customdataset(train_set, train_label)
validdataset = customdataset(valid_set, valid_label)
traindataloader1 = DataLoader(traindataset, batch_size=32, shuffle=True, drop_last=True )
validdataloader1 = DataLoader(validdataset, batch_size=32, shuffle=True, drop_last=True )
testdataset = customdataset(data2, label2)
testloader = DataLoader(testdataset, batch_size=1, shuffle=False, drop_last=False )
return traindataloader1,validdataloader1,testloader '''
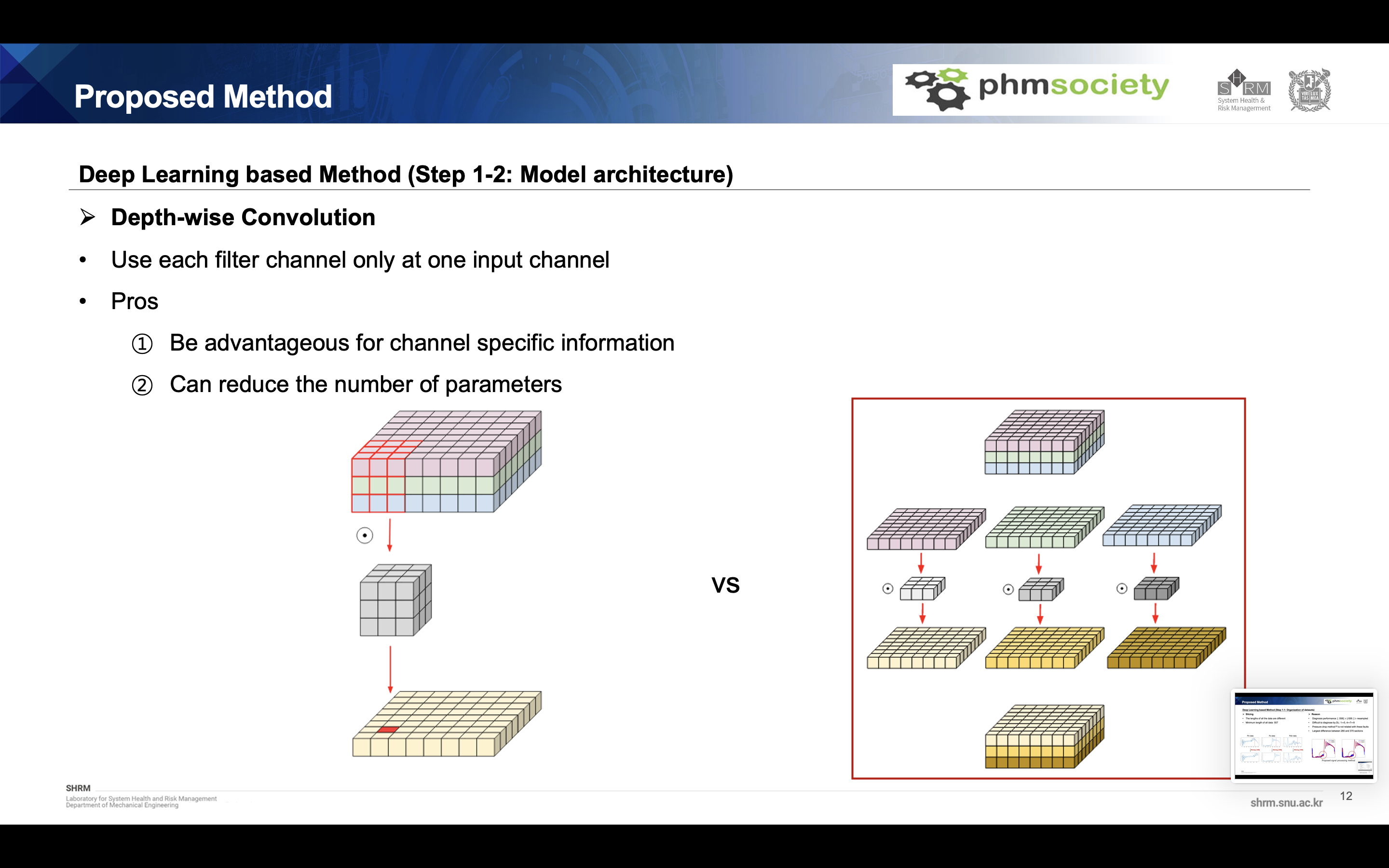
Depthwise based cnn encoder
We changed the structure of the encoder of the deep learning model. The depth-wise convolution structure is used, and since it is extracted separately for each channel, sensor&class specific information can be extracted more, and the number of parameters can be reduced compared to the existing model, preventing overfitting.
’’’ class GlobalAvgPool(nn.Module): def _init__(self): super(GlobalAvgPool,self)._init__() def forward(self,x): return x.mean(axis=-1) class Feature_extractor1(nn.Module):
def __init__(self):
super(Feature_extractor1, self).__init__()
self.bn = nn.BatchNorm1d(1)
self.conv1 = nn.Sequential(nn.Conv1d(1, 3, kernel_size=1, stride = 1, padding=0),
nn.ReLU())
self.conv2 = nn.Sequential(nn.Conv1d(1, 3, kernel_size=3, stride = 1, padding=1),
nn.ReLU())
self.conv3 = nn.Sequential(nn.Conv1d(1, 3, kernel_size=5, stride = 1, padding=2),
nn.ReLU())
def forward(self, x):
x = self.bn(x)
x1 = self.conv1(x)
x2 = self.conv2(x)
x3 = self.conv3(x)
return x1,x2,x3 class Feature_extractor2(nn.Module):
def __init__(self):
super(Feature_extractor2, self).__init__()
self.bn = nn.BatchNorm1d(1)
self.conv1 = nn.Sequential(nn.Conv1d(1, 3, kernel_size=1, stride = 1, padding=0),
nn.ReLU())
self.conv2 = nn.Sequential(nn.Conv1d(1, 3, kernel_size=3, stride = 1, padding=1),
nn.ReLU())
self.conv3 = nn.Sequential(nn.Conv1d(1, 3, kernel_size=5, stride = 1, padding=2),
nn.ReLU())
def forward(self, x):
x = self.bn(x)
x1 = self.conv1(x)
x2 = self.conv2(x)
x3 = self.conv3(x)
return x1,x2,x3 class Feature_extractor3(nn.Module):
def __init__(self):
super(Feature_extractor3, self).__init__()
self.bn = nn.BatchNorm1d(1)
self.conv1 = nn.Sequential(nn.Conv1d(1, 3, kernel_size=1, stride = 1, padding=0),
nn.ReLU())
self.conv2 = nn.Sequential(nn.Conv1d(1, 3, kernel_size=3, stride = 1, padding=1),
nn.ReLU())
self.conv3 = nn.Sequential(nn.Conv1d(1, 3, kernel_size=5, stride = 1, padding=2),
nn.ReLU())
def forward(self, x):
x = self.bn(x)
x1 = self.conv1(x)
x2 = self.conv2(x)
x3 = self.conv3(x)
return x1,x2,x3
class SimpleConv(nn.Module): def init(self): super(SimpleConv,self).init() self.bn_concat = nn.BatchNorm1d(30)
self.bottle_1 = nn.Conv1d(30,128,kernel_size=1, stride=1, bias=False)
self.bottle_2 = nn.Conv1d(128,64, kernel_size=3, stride=1, bias=False, padding=1)
self.bottle_3 = nn.Conv1d(30,128,kernel_size=3, stride=1, bias=False, padding=1)
self.bottle_4 = nn.Conv1d(128, 64, kernel_size=1, stride=1, bias=False)
self.bn_bottleneck24 = nn.BatchNorm1d(30+64+64)
self.bottle_5 = nn.Conv1d(30+64+64,256,kernel_size=1, stride=1, bias=False)
self.bottle_6 = nn.Conv1d(256,128,kernel_size=3, stride=1, bias=False, padding=1)
self.bn_output = nn.BatchNorm1d(128)
self.conv_out = nn.Conv1d(128, 64, kernel_size=1, stride=1, bias=False)
self.relu = nn.ReLU()
self.gap = GlobalAvgPool()
self.fc1 = nn.Sequential(
nn.Linear(64, 32),
nn.BatchNorm1d(32),
nn.ReLU())
self.fc2 =nn.Linear(32, 11)
def forward(self, inputs):
concat = self.relu(inputs)
bn_concat = self.bn_concat(concat)
bottle_1 = self.bottle_1(bn_concat)
bottle_1 = self.relu(bottle_1)
bottle_2 = self.bottle_2(bottle_1)
bottle_2 = self.relu(bottle_2)
bottle_3 = self.bottle_3(bn_concat)
bottle_3 = self.relu(bottle_3)
bottle_4 = self.bottle_4(bottle_3)
bottle_4 = self.relu(bottle_4)
bottle24_concat = torch.cat([bn_concat, bottle_2, bottle_4],axis=1)
bottle24_concat = self.bn_bottleneck24(bottle24_concat)
bottle_5 = self.bottle_5(bottle24_concat)
bottle_5 = self.relu(bottle_5)
bottle_6 = self.bottle_6(bottle_5)
bottle_6 = self.relu(bottle_6)
conv_out = self.bn_output(bottle_6)
out = self.conv_out(conv_out)
out = self.relu(out)
outview = self.gap(out)
out = self.fc1(outview)
out = self.fc2(out)
return out,outview
feature_extractor1 = Feature_extractor1().to(device) feature_extractor2 = Feature_extractor2().to(device) feature_extractor3 = Feature_extractor3().to(device) SimpleConvmodel = SimpleConv().to(device)
’’’
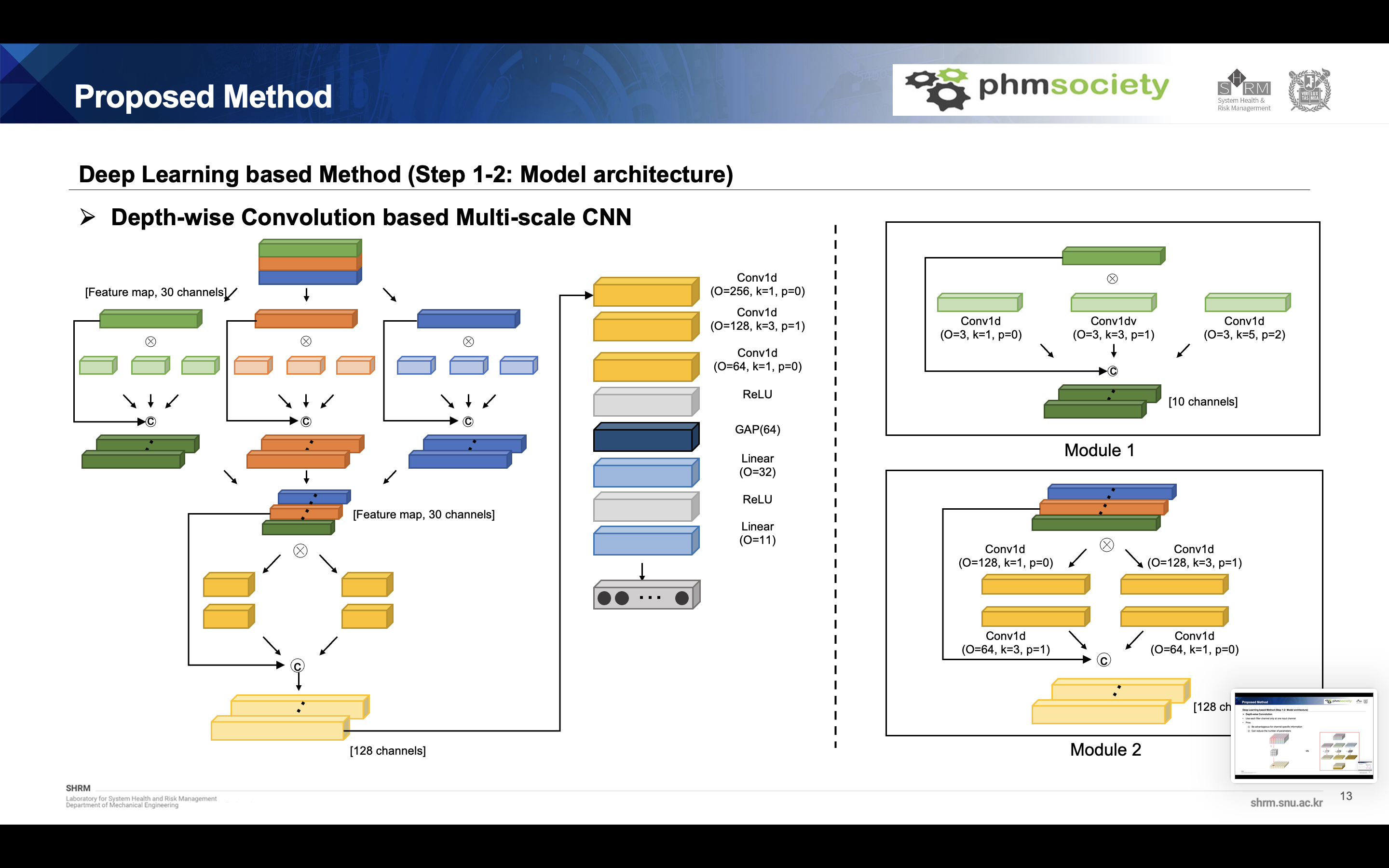
Deep learning model
The final model is as follows. A feature map was obtained by concatenate the features obtained by applying module 1 combining depth wise convolution and multi-scale convolution for each sensor. This was classified through a classifier to which the multi-scale convolution module2 and linear classifers
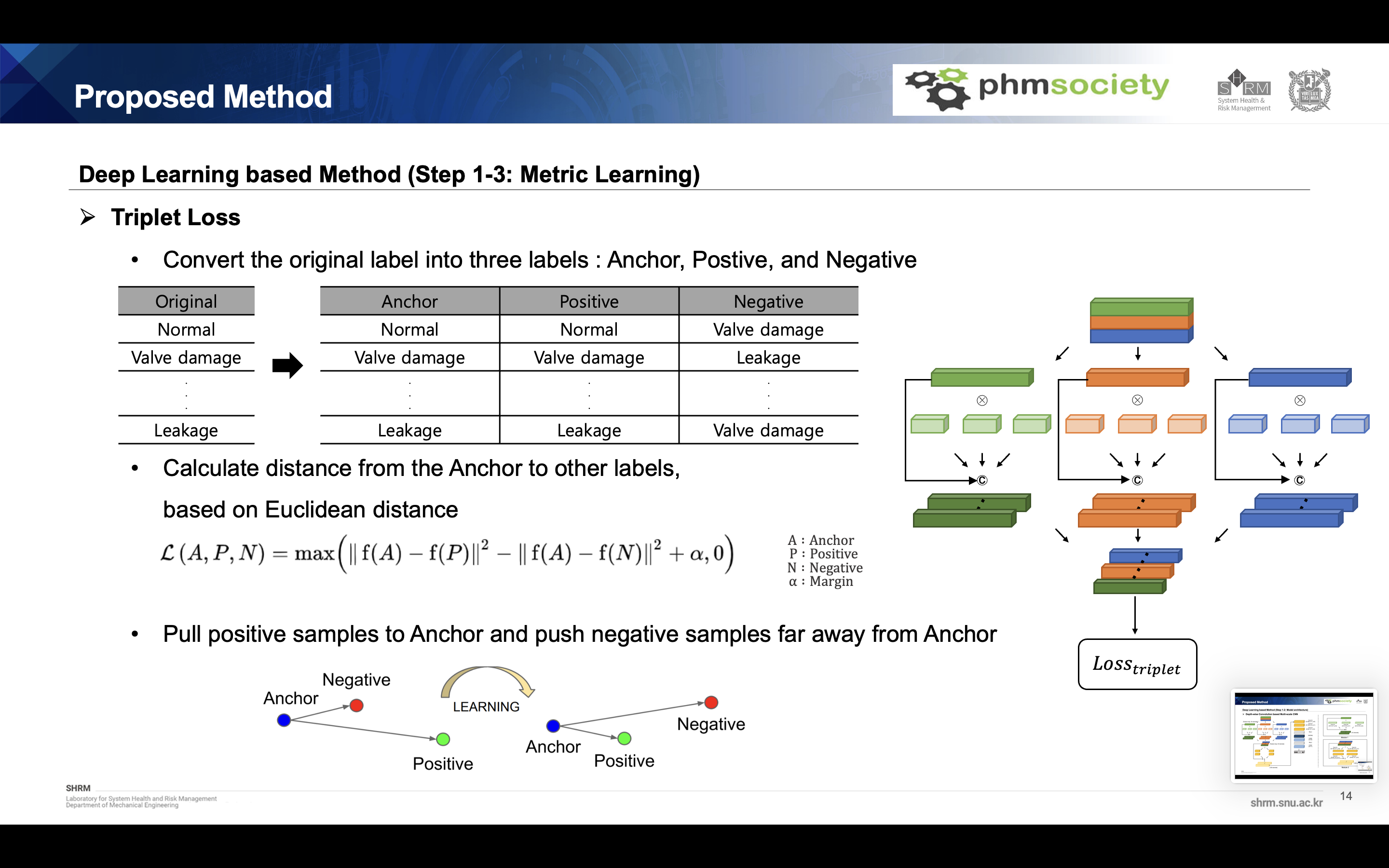
Metric learning(Triplet loss)
The model is learned based on metric learning, and we used triplet loss function. Unlike general labels, the data loader is constructed of three columns: anchor, positive, and negative. Anchor is the reference sample, positive is the sample which have the same label with anchor, and the negative is the sample which have the different label with anchor, they all extracted randomly. It is combined with margin based on Euclidean distance to calculate the loss function. Through this metric learning, anchor and positive sample pull each other and anchor and negative sample push each other. This loss function is calculated for the first feature map.
 ‘’’ class TripletCustomdataset(Dataset): def _init__(self, data, label): # self.data=data
‘’’ class TripletCustomdataset(Dataset): def _init__(self, data, label): # self.data=data
self.pin_data=data[:,0,:].unsqueeze(1)
self.po_data=data[:,1,:].unsqueeze(1) self.pdin_data=data[:,2,:].unsqueeze(1)
self.label=label
self.index = array(range(len(label)))
def __len__(self):
return len(self.label)
def __getitem__(self, item):
anchor_pin_data = self.pin_data[item]
anchor_po_data = self.po_data[item]
anchor_pdin_data = self.pdin_data[item]
anchor_label = self.label[item]
positive_list = self.index[self.index!=item][self.label[self.index!=item]==anchor_label]
positive_item = random.choice(positive_list)
positive_pin_data = self.pin_data[positive_item]
positive_po_data = self.po_data[positive_item]
positive_pdin_data = self.pdin_data[positive_item]
negative_list = self.index[self.index!=item][self.label[self.index!=item]!=anchor_label]
negative_item = random.choice(negative_list)
negative_pin_data = self.pin_data[negative_item]
negative_po_data = self.po_data[negative_item]
negative_pdin_data = self.pdin_data[negative_item]
return anchor_pin_data.to(device).float(),anchor_po_data.to(device).float(),anchor_pdin_data.to(device).float(), positive_pin_data.to(device).float(),positive_po_data.to(device).float(),positive_pdin_data.to(device).float(), negative_pin_data.to(device).float(),negative_po_data.to(device).float(),negative_pdin_data.to(device).float(), anchor_label.to(device) def tripletloader(data,label):
tripletdataset=TripletCustomdataset(data,label)
triplet__dataloader = DataLoader(tripletdataset, batch_size=32, shuffle=True, drop_last=True )
return triplet__dataloader
class TripletLoss(nn.Module): def _init__(self, margin=1.0): super(TripletLoss, self)._init__() self.margin = margin
def calc_euclidean(self, x1, x2):
return (x1 - x2).pow(2).sum(1)
def forward(self, anchor: torch.Tensor, positive: torch.Tensor, negative: torch.Tensor) -> torch.Tensor:
distance_positive = self.calc_euclidean(anchor, positive)
distance_negative = self.calc_euclidean(anchor, negative)
losses = torch.relu(distance_positive - distance_negative + self.margin)
return losses.mean()
tripletloss=TripletLoss()
’’’
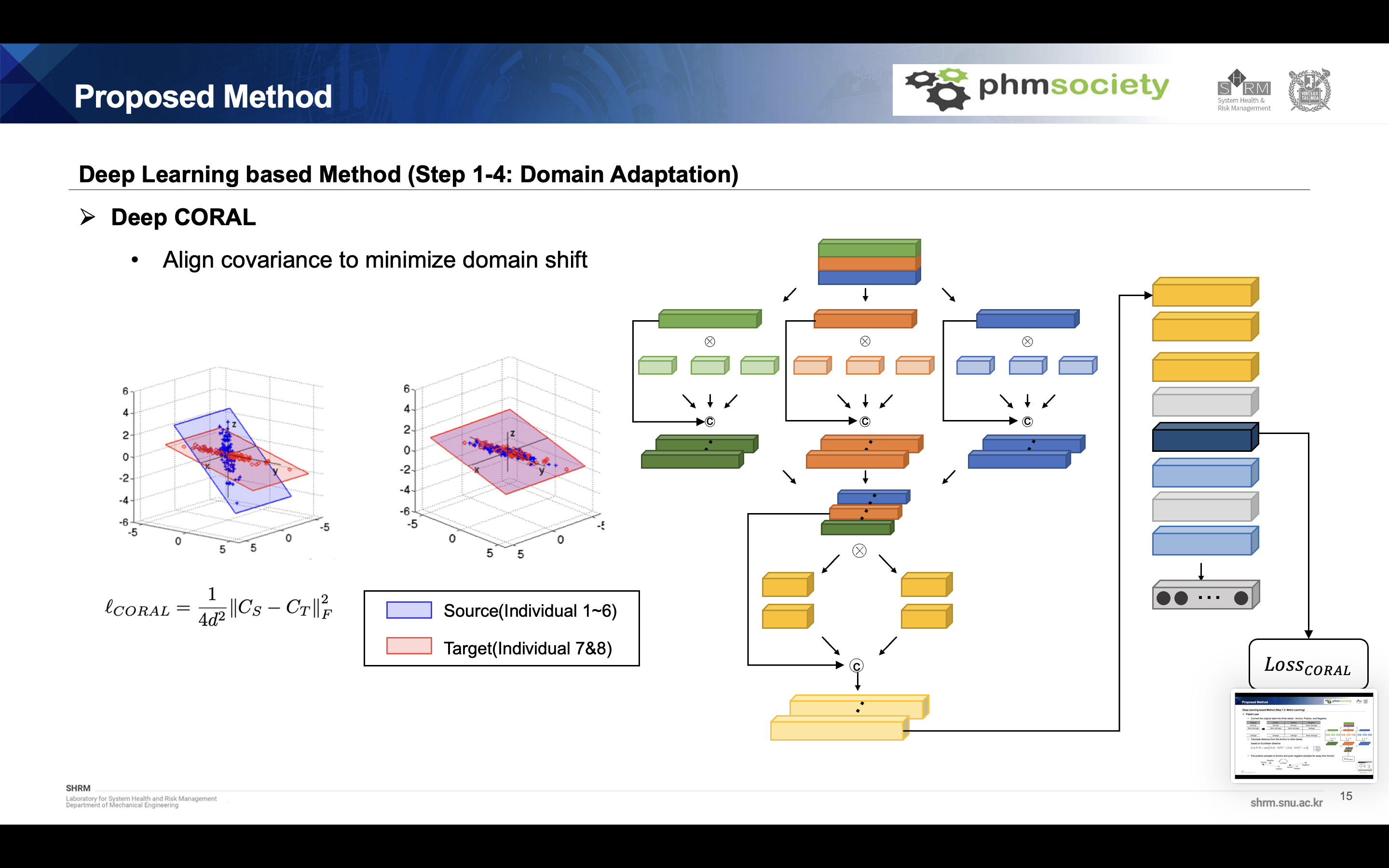
## Domain adaptation Because of domain discrepancy between each individual dataset, we have to consider the domain adaptation technique. We used Deep coral function for domain adaptation. This method align the covariance of each domain to minimize domain shift. And this function is calculated at Global averaged pooling layer.
 ‘’’ def CORAL(source, target): d = source.data.shape[1]
‘’’ def CORAL(source, target): d = source.data.shape[1]
# source covariance
xm = torch.mean(source, 0, keepdim=True) - source
xc = xm.t() @ xm # matmul
# target covariance
xmt = torch.mean(target, 0, keepdim=True) - target
xct = xmt.t() @ xmt
# frobenius norm between source and target
loss = torch.mean(torch.mul((xc - xct), (xc - xct)))
loss = loss/(4*d*d)
return loss T1 = 100 T2 = 700 af = 3
def alpha_weight(step): if step < T1: return 0.0 elif step > T2: return af else: return ((step-T1) / (T2-T1))*af
’’’
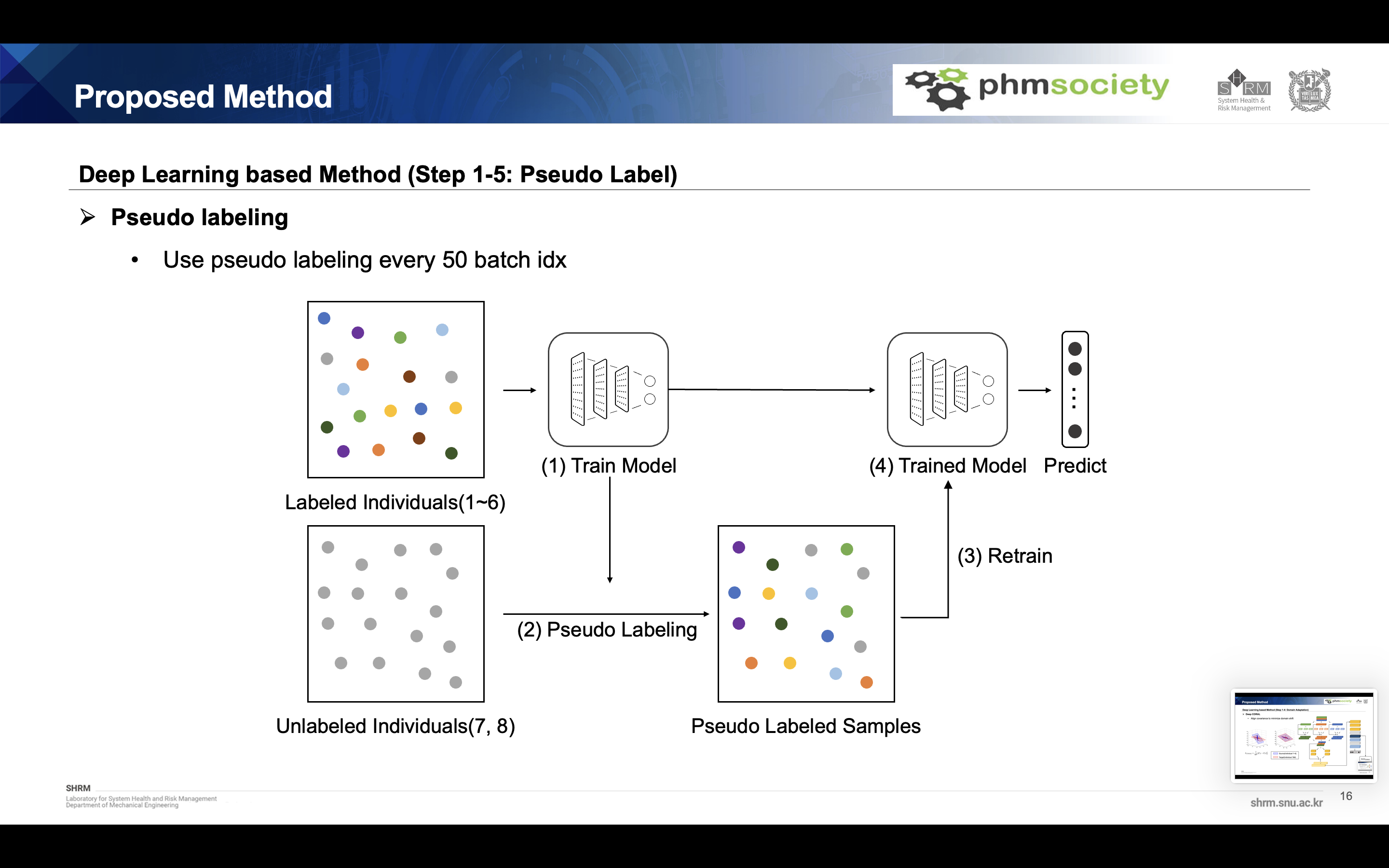
Pseudo labeling
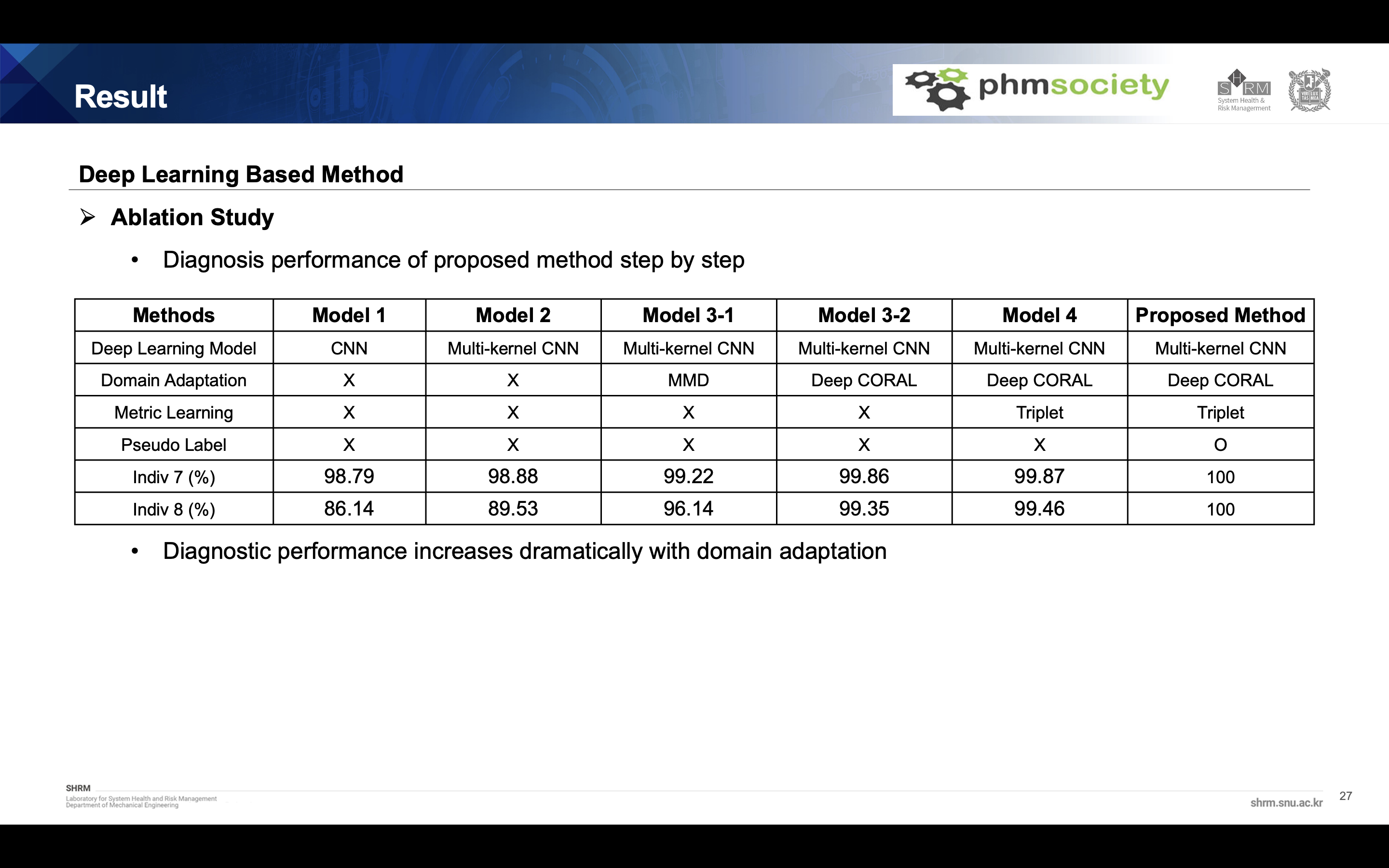
Although it obtained almost 99.9% accuracy in the previous step, it was decided to use data from the target domain to obtain higher accuracy. So we used the pseudo labeling method. This method assign the temporary label to target data and using this target data, retrain the model every 50 batch idx. Through this method, we can get 100% accuracy for both individual 7 and 8 dataset.
’’’ def train_target(extractor1,extractor2,extractor3,classifier, criterion, dataloader,tdataloader,triplet_loader, optimizer, epoch, step):
# setup models
extractor1.eval()
extractor2.eval()
extractor3.eval()
classifier.eval()
# steps
start_steps = epoch * len(dataloader)
total_steps = 10 * len(dataloader)
for batch_idx, tdata in enumerate(tdataloader): # prepare the data
# signal1,signal2,signal3,label = data
# signal1,signal2,signal3,label = Variable(signal1.cuda()), Variable(signal2.cuda()),Variable(signal3.cuda()),Variable(label.cuda().long())
# tsignal1,tsignal2,tsignal3,tlabel = tdata
tsignal1,tsignal2,tsignal3 = tdata
# tsignal1,tsignal2,tsignal3,tlabel = Variable(tsignal1.cuda()), Variable(tsignal2.cuda()),Variable(tsignal3.cuda()),Variable(tlabel.cuda())
tsignal1,tsignal2,tsignal3 = Variable(tsignal1.cuda()), Variable(tsignal2.cuda()),Variable(tsignal3.cuda())
# anchor_pin_data, anchor_po_data, anchor_pdin_data, positive_pin_data, positive_po_data, positive_pdin_data, negative_pin_data, negative_po_data, negative_pdin_data,anchor_label=tripletdata
# anchor_pin_data, anchor_po_data, anchor_pdin_data, positive_pin_data, positive_po_data, positive_pdin_data, negative_pin_data, negative_po_data, negative_pdin_data,anchor_label = Variable(anchor_pin_data.cuda()), Variable(anchor_po_data.cuda()),Variable(anchor_pdin_data.cuda()),Variable(positive_pin_data.cuda()), Variable(positive_po_data.cuda()),Variable(positive_pdin_data.cuda()),Variable(negative_pin_data.cuda()), Variable(negative_po_data.cuda()),Variable(negative_pdin_data.cuda()),Variable(anchor_label.cuda().long())
optimizer.zero_grad()
tfeature11,tfeature21,tfeature31 = extractor1(tsignal1)
tfeature12,tfeature22,tfeature32 = extractor2(tsignal2)
tfeature13,tfeature23,tfeature33 = extractor3(tsignal3)
tfeature=torch.cat((tsignal1,tsignal2,tsignal3,tfeature11,tfeature21,tfeature31,tfeature12,tfeature22,tfeature32,tfeature13,tfeature23,tfeature33),dim=1)
tout ,_= classifier(tfeature)
_, pseudo = torch.max(tout,1)
extractor1.train()
extractor2.train()
extractor3.train()
classifier.train()
tfeature11,tfeature21,tfeature31 = extractor1(tsignal1)
tfeature12,tfeature22,tfeature32 = extractor2(tsignal2)
tfeature13,tfeature23,tfeature33 = extractor3(tsignal3)
tfeature=torch.cat((tsignal1,tsignal2,tsignal3,tfeature11,tfeature21,tfeature31,tfeature12,tfeature22,tfeature32,tfeature13,tfeature23,tfeature33),dim=1)
tout ,_= classifier(tfeature)
loss = alpha_weight(step)*criterion(tout, pseudo)
loss.backward()
optimizer.step()
if batch_idx % 50 ==0:
for batch_idx, (data,tdata, tripletdata) in enumerate(zip(dataloader,tdataloader, triplet_loader)): # prepare the data
signal1,signal2,signal3,label = data
signal1,signal2,signal3,label = Variable(signal1.cuda()), Variable(signal2.cuda()),Variable(signal3.cuda()),Variable(label.cuda().long())
# tsignal1,tsignal2,tsignal3,tlabel = tdata
tsignal1,tsignal2,tsignal3 = tdata
tsignal1,tsignal2,tsignal3 = Variable(tsignal1.cuda()), Variable(tsignal2.cuda()),Variable(tsignal3.cuda())
# tsignal1,tsignal2,tsignal3,tlabel = Variable(tsignal1.cuda()), Variable(tsignal2.cuda()),Variable(tsignal3.cuda()),Variable(tlabel.cuda())
anchor_pin_data, anchor_po_data, anchor_pdin_data, positive_pin_data, positive_po_data, positive_pdin_data, negative_pin_data, negative_po_data, negative_pdin_data,anchor_label=tripletdata
anchor_pin_data, anchor_po_data, anchor_pdin_data, positive_pin_data, positive_po_data, positive_pdin_data, negative_pin_data, negative_po_data, negative_pdin_data,anchor_label = Variable(anchor_pin_data.cuda()), Variable(anchor_po_data.cuda()),Variable(anchor_pdin_data.cuda()),Variable(positive_pin_data.cuda()), Variable(positive_po_data.cuda()),Variable(positive_pdin_data.cuda()),Variable(negative_pin_data.cuda()), Variable(negative_po_data.cuda()),Variable(negative_pdin_data.cuda()),Variable(anchor_label.cuda().long())
optimizer.zero_grad()
feature11,feature21,feature31 = extractor1(signal1)
feature12,feature22,feature32 = extractor2(signal2)
feature13,feature23,feature33 = extractor3(signal3)
feature=torch.cat((signal1,signal2,signal3,feature11,feature21,feature31,feature12,feature22,feature32,feature13,feature23,feature33),dim=1)
# feature=torch.cat((feature1, feature2,feature3),dim=1)
out,_ = classifier(feature)
tfeature11,tfeature21,tfeature31 = extractor1(tsignal1)
tfeature12,tfeature22,tfeature32 = extractor2(tsignal2)
tfeature13,tfeature23,tfeature33 = extractor3(tsignal3)
tfeature=torch.cat((tsignal1,tsignal2,tsignal3,tfeature11,tfeature21,tfeature31,tfeature12,tfeature22,tfeature32,tfeature13,tfeature23,tfeature33),dim=1)
tout,_ = classifier(tfeature)
afeature11,afeature21,afeature31 = extractor1(anchor_pin_data)
afeature12,afeature22,afeature32 = extractor2(anchor_po_data)
afeature13,afeature23,afeature33 = extractor3(anchor_pdin_data)
anchorfeature=torch.cat((anchor_pin_data,anchor_po_data,anchor_pdin_data,afeature11,afeature21,afeature31,afeature12,afeature22,afeature32,afeature13,afeature23,afeature33),dim=1)
anchorout,anchorxview = classifier(anchorfeature)
pafeature11,pafeature21,pafeature31 = extractor1(positive_pin_data)
pafeature12,pafeature22,pafeature32 = extractor2(positive_po_data)
pafeature13,pafeature23,pafeature33 = extractor3(positive_pdin_data)
panchorfeature=torch.cat((positive_pin_data,positive_po_data,positive_pdin_data,pafeature11,pafeature21,pafeature31,pafeature12,pafeature22,pafeature32,pafeature13,pafeature23,pafeature33),dim=1)
positiveout,positivexview = classifier(panchorfeature)
nafeature11,nafeature21,nafeature31 = extractor1(negative_pin_data)
nafeature12,nafeature22,nafeature32 = extractor2(negative_po_data)
nafeature13,nafeature23,nafeature33 = extractor3(negative_pdin_data)
nanchorfeature=torch.cat((negative_pin_data,negative_po_data,negative_pdin_data,nafeature11,nafeature21,nafeature31,nafeature12,nafeature22,nafeature32,nafeature13,nafeature23,nafeature33),dim=1)
negatieout,negatiexview = classifier(nanchorfeature)
triplet_loss=tripletloss(anchorxview,positivexview,negatiexview)
coral_loss = CORAL(out,tout)
loss = criterion(out, label)+triplet_loss+coral_loss
loss.backward()
optimizer.step()
step += 1
# print loss
if (batch_idx + 1) % 100 == 0:
print('[{}/{} ({:.0f}%)]\t pseudo Loss: {:.6f}'.format(batch_idx * len(signal1), len(dataloader.dataset),100. * batch_idx / len(dataloader), loss.item()))
# total_loss.append(loss.item()) '''